
The Ant System for Problems with Discrete Variables with Beam Design Example
- Adisorn O.
- Oct 1, 2025
- 4 min read

Introduction
The original Ant System (AS) was proposed by Marco Dorigo in 1990. AS has shown its efficiency and simplified concept in solving discrete and combinatorial problems like the Traveling Salesman Problem (TSP), Knapsack, Vehicle Routing, Job Scheduling, for example. Most of the problems to be solved by AS are NP-hard, which are difficult to solve using other meta-heuristic algorithms.



AS algorithm is analogous to finding a new cooking recipe where a group of chefs tries to choose the ingredients from the list. The taste of the food is feedback, as an objective value. Each ingredient, like meat, egg, and onion, for example, has a different heuristic and was chosen at different times based on how it could improve the value of the completed food.
Analogy
Chefs | Ants |
Each food plate | Each path option, each design solution |
Taste | Objective value |
Cost of the ingredient | Distance of each individual path, Unit price of each item |
Trace of selected ingredient | Pheromone |

The pseudo code of the Ant System (AS) is listed below.
Initialize pheromone trails τ(i) = τ0
Set algorithm parameters: α, β, ρ, Q
For iter = 1 to maxIter
For each ant k = 1 to nAnts
Construct a solution:
For each decision variable j
Compute probabilities:
P(option) ∝ τ(option)^α * η(option)^β
Select option by Roulette Wheel
End
Evaluate objective value f(Sk)
End
Evaporate pheromone:
τ(i) = (1 - ρ) * τ(i)
Reinforce pheromone:
For each ant k
For each option chosen in solution Sk
τ(option) = τ(option) + Q / f(Sk)
End
End
Update best solution
End
Concept
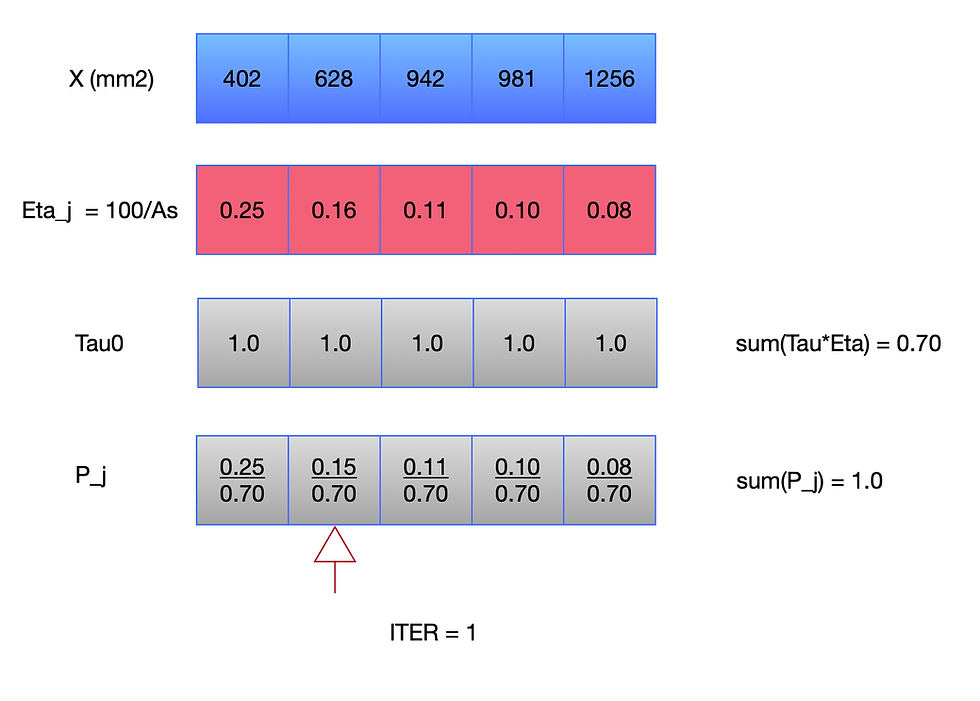
Each ant picks up the design option from the list, which can be one of the items for each list, or the travel path from i to j, based on the probability Pj. Higher probability items get more chances to be selected by the Roulette wheel operation, like in GA. The Probability is built up from the relative pheromone level, i.e.
Pj = Tau_j*Eta_j/sum_all(Tau*Eta) where Tau = Pheromone value = Q/f(x) = Q/Cost
for minimization problem smaller As --> more pheromone then Tau = 100/As
In AS, the total pheromone is computed for each solution from ant 'k' after each iteration

Delta_Tau for ant 'k' is added to the total pheromone only for the chosen solution S_k and zero for others.

Q = scaling factor
Eta = Heuristic i.e. Value of the item j = 1/ Cost_j or 1/Path_distance
In this example, the smaller As is better then Eta = 100/As.
Example -- Concrete Beam Design
We want to design a single-span beam L = 6 m subjected to a uniform load w = 25 kN/m. Then the maximum moment at mid span is Mu = w*L^2/8 = 25*36/8 = 112.5 kNm. Given, fy = 400 MPa, d = 500 mm
The objective is to find the rebar with the minimum weight. The rebar is only available from the list.
Constraint:
0.9xMn > 1.6xMu, where Mn = Asfy(0.9d)
The AS loop can be explained as shown below. In the first iteration, the pheromone is given as 1.0. The rebar with lower weight per length has a higher chance of being selected. However, it turns out that the larger rebar size finally becomes the best solution due to the imposed constraint.



The ACS (Ant Colony System) is the updated version of AS, also by Dorigo (1996). The pheromone (Tau) is updated immediately after each ant 'k' get its solution. So the update is done 'k' time for each iteration. This local update leads to faster convergence as shown in the convergence plot. This is the same manner as used in stochastic gradient descent. Global update after each iteration is done only by the best ant (best solution), same as in AS.
The pseudo code for ACS is shown as following
Initialize pheromone trails τ(i) = τ0
Set algorithm parameters: α, β, ρ, Q, q0, ξ
For iter = 1 to maxIter
For each ant k = 1 to nAnts
Construct a solution:
For each decision variable j
Compute probabilities:
P(option) ∝ τ(option)^α * η(option)^β
If rand < q0:
Select option with highest P (greedy)
Else:
Select option by Roulette Wheel
Local pheromone update:
τ(option) = (1 - ξ)*τ(option) + ξ*τ0
End
Evaluate objective value f(Sk)
End
Global pheromone update (only best ant):
Evaporation:
τ(i) = (1 - ρ) * τ(i)
Reinforcement:
For each option in best solution Sbest
τ(option) = τ(option) + Q / f(Sbest)
Update best solution
End
What if the number of variables is more than 1?
The same algorithm structure is used, but we just add the loop for each design variable inside the ant loop. Let's see the pseudo-code below.
Initialize pheromone τ(var,option)
For iter = 1:maxIter
For each ant
For var = 1:2
Compute probs for this variable
Select option (roulette / ACS rule)
Save choice
Local update (ACS)
End
Evaluate full design (beam1, beam2)
Save cost, feasibility
End
Evaporate pheromone
Update pheromone deposits (all ants in AS, best ant in ACS)
Record best solution
End