Comparison of Integration Methods for General Dynamic Response
- Adisorn O.
- 13 hours ago
- 4 min read

Updated: 38 minutes ago
Introduction
Several time-integration methods for the dynamic response of structures subjected to general time-dependent loading are available. They are classified into 3 main methods: 1. Duhamel's integral (Superposition of impulse)
Fourier Series & Fourier Integral (Superposition of the global sine and cosine waves)
Direct time integration
Duhamel's Integral
The Duhamel integral transforms the continuous load function into a sequence of discrete impulses. Then the response from each impulse, with a time lag of Tau, is summed to obtain the total response. Obviously, this method is only applied to linear problems.


Superposition of the impulse response by Duhamel's integral
Fourier Series & Fourier Integral
The periodic load function can be decomposed into several simple sine and cosine (harmonic) functions, where the force magnitude can be computed as Fourier coefficients. The total response is the summation of the responses from each of those simple harmonic waves.

The accuracy of using the Fourier series depends on the number of Fourier terms to expand. This method is therefore only applied to linear transient problems with periodic excitation. For a non-periodic load, the more advanced Fourier integral (Fourier Transform) can be applied.
Type of function | Periodic | Non-periodic or transient |
Frequency content | Discrete | Continuous |
Frequencies | n*omega_0 | all omega |
Load representation | Sum | Integral |
Best for | harmonic/periodic loading | earthquake, impulse, arbitrary time history |
Structural response | sum of harmonic steady-state responses | inverse transform of full frequency-domain response |
Direct Time Integration Methods
The dynamic equilibrium equation consists of the unknown displacement, velocity, and acceleration at t+1 (the next time step), which can be solved directly by time integration. The word 'direct' means that the equation won't be transformed to any other subspace (i.e. mode shape) before solving (Bathe, 1996).
The direct integration method can be implemented as an implicit or Explicit method. The implicit method, for example, the Newmark method, Taylor's series is used to approximate velocity and acceleration at t + 1 in terms of the solution at time step t. Finally, the unknowns at t+1 are cast into the unknown displacement u(t+1), then solved by a linear system equation, i.e.
[K_eff]{u(t+1)} = F_eff(t)
[K_eff] = [K] + a*[M] + a1*[C] is known and might need to be updated for a nonlinear problem. The RHS force vector is known at time step t, and we can solve the displacement at t+1. Then the velocity and acceleration can be computed using Taylor's expansion formula.
The MATLAB code to perform the solution at time step t+1 is shown below

The explicit methods is based on finite difference approximation of velocity and acceleration in terms of displacement at t+1, i.e.
v(t+1) = (u(t+1)-u(t-1))/2dt. --- (1)
a(t+1) =( v(t+1)-v(t-1))/dt = (u(t+1)-2u(t)+u(t-1))/dt^2 --- (2)
Then
Ma(t+1) + Cv(t+1) + Ku(t+1) = F(t+1) --- (3)
Substituting (1) and (2) into (3) gives
[M/dt^2 + C/2dt] u(t+1) + [K-2M/dt^2] u(t) + [M/dt^2-c/2dt] u(t-1) = F(t)
Note
For nonlinear problem, K u(t+1) is replaced by F_int (u_t+1). The equation must the nbe solved using Newton-Raphson iteration
(see https://www.alpsconsult.net/post/algorithm-template-for-nonlinear-dynamic-solver-using-the-newmark-method for more details)
Then u(t+1) can be solved for from this equation using the known u(t) and u(t-1). This requires inverting the term [M/dt^2 + C/2dt], but if M and C are diagonal, the elimination process is not needed. The MATLAB code to perform the solution at time step t+1 is shown below

It should be noted that the initial solution u(t-1) is also unknown but can be computed from backward Taylor's approximation (-dt)
u(t-1) = u(t) - v(t)*dt + 1/2 a(t)*dt^2
MATLAB code

The implicit method is unconditionally stable for any dt. It has an advantage in loading that excites low- to moderate-frequency responses, such as seismic loads. However, the time step must still be sufficiently small to ensure accuracy and nonlinear convergence.
The explicit method is conditionally stable. A sufficiently small value of dt is normally necessary; dt < Tn/pi is required for a stable response, where Tn represents the lowest fundamental period of the system. This is suitable for impact and contact problems, such as vehicle crashworthiness analysis and wave propagation. It's not a standard method for seismic response analysis of structures.
Method | Main idea | Best suited for | Load type | System type | Strength | Limitation |
Duhamel integral | Response is obtained by convolution of load with impulse response | SDOF / modal linear dynamics | Arbitrary time history | Mainly linear | Very clear physical meaning; exact for linear systems | |
Fourier series | Periodic load is decomposed into discrete harmonic components | Periodic vibration, machine loads, repeated loads | Periodic load | Linear | Elegant frequency-domain solution; shows resonance clearly | Not natural for transient loads unless artificially repeated |
Fourier integral / transform | Non-periodic load is decomposed into continuous frequency components | Earthquake, blast, pulse, arbitrary transient load | Non-periodic / transient | Linear | Efficient with FFT; useful for frequency-response analysis | Needs care with sampling, leakage, zero-padding, wrap-around |
Newmark method | Marches response step-by-step in time using displacement, velocity, acceleration update formulas | General structural dynamic analysis and FEM | Any sampled time history | Linear and nonlinear | Very practical; works with MDOF FEM; can include material/geometric nonlinearity | Accuracy depends on time step and parameters; nonlinear case needs Newton iteration |
Central difference | Explicit time integration using previous/current displacement | Impact, wave propagation, large explicit FEM | Any sampled time history | Linear and nonlinear | Simple and fast per step; no global matrix factorization | Conditionally stable; requires very small time step |
Wilson-\theta | Extends acceleration assumption over enlarged time step \theta \Delta t | Linear structural dynamics, older FEM codes | Any sampled time history | Mostly linear | Strong numerical stability | Can introduce numerical damping and phase error |
Situation | Recommended method |
Closed-form understanding of linear SDOF response | Duhamel integral |
Periodic machine vibration | Fourier series |
Earthquake record in the frequency domain | Fourier transform / FFT |
General FEM time-history analysis | Newmark |
Nonlinear frame / material plasticity / geometric nonlinearity | Newmark + Newton iteration |
Very fast short-duration impact analysis | Central difference |
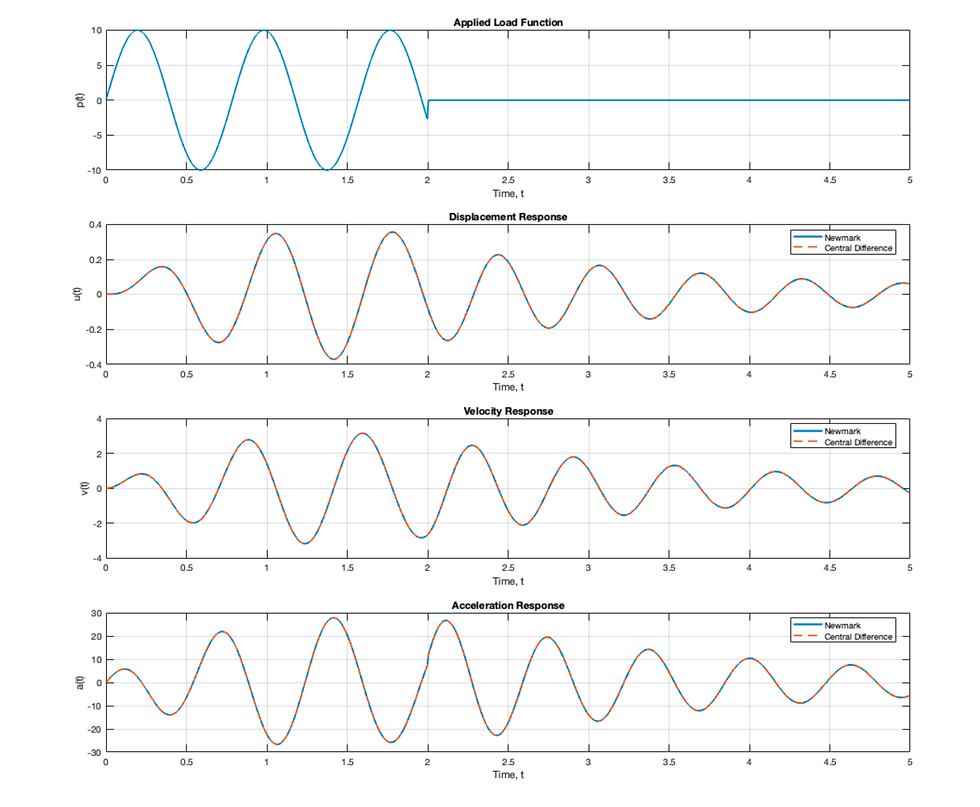
Comparison of Newmark (Implicit) and Central Difference (Explicit) solutions
References:
Bathe, Finite Element Procedure, Prentice-Hall, 1996
Cimellaro and Marasco, Introduction to Dynamics of Structures and Earthquake Engineering, Springer, 2018
Oechsner, Computational Statics and Dynamics, Springer, 3rd ed, 2023