
Geometric Nonlinear Truss using Updated Lagrangian (UL) – MATLAB Implementation
- Adisorn O.
- May 12, 2025
- 4 min read

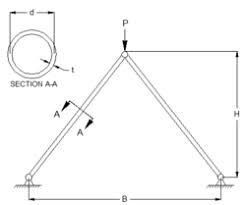
Inclined 2-Bar Truss with Geometric Nonlinearity and Transformation Matrix
This example models a 2-bar inclined truss using the Updated Lagrangian (UL) method. Each bar is inclined, and local stiffness is transformed to global coordinates using a transformation matrix. Geometric stiffness is included in the global stiffness matrix, but element forces are derived only from material strain.
MATLAB Code: Inclined 2-Bar Truss with Transformation
% Properties and Geometry
A = 0.01; E = 200e9; Et = 2e9; sigma_y = 250e6;
coords0 = [0 0; 2 1; 4 0]; % Node 1, 2, 3 (X,Y)
conn = [1 2; 2 3]; % Two truss bars
F_ext = zeros(6,1); F_ext(5) = 0; F_ext(6) = -300e3; % Load at Node 3 (vertical)
% Initialization
u = zeros(6,1); % DOF vector (2 per node)
u_hist = [];
for step = 1:1 % Single load step for simplicity
f_ext = F_ext;
u_iter = u;
for iter = 1:20
K_global = zeros(6); f_int = zeros(6,1);
coords = coords0 + reshape(u_iter,2,[])'; % Update node positions
for e = 1:size(conn,1)
i = conn(e,1); j = conn(e,2);
xi = coords(i,:); xj = coords(j,:);
x0i = coords0(i,:); x0j = coords0(j,:);
L0 = norm(x0j - x0i);
Le = norm(xj - xi);
eps = (Le - L0)/L0;
% Determine current stiffness
Ee = (abs(eps*E) < sigma_y) * E + (abs(eps*E) >= sigma_y) * Et;
N = A * Ee * eps;
% Local to global transformation
lx = (xj(1) - xi(1)) / Le;
ly = (xj(2) - xi(2)) / Le;
T = [lx ly 0 0; 0 0 lx ly]; % Transform 2D axial to global
% Local element stiffness matrices
ke = A * Ee / L0 * [1 -1; -1 1]; % Material stiffness
kg = N / Le * [1 -1; -1 1]; % Geometric stiffness
k_local = ke + kg;
% Global transformation
K_global_e = T' * k_local * T;
% Assemble into global matrix
idx = [2*i-1 2*i 2*j-1 2*j];
K_global(idx,idx) = K_global(idx,idx) + K_global_e;
% Internal force (only from axial strain, not geometric stiffness)
f_local = N * [-1; 1];
f_global = T' * f_local;
f_int(idx) = f_int(idx) + f_global;
end
r = f_ext - f_int;
if norm(r) < 1e-3, break; end
du = K_global \ r;
u_iter = u_iter + du;
end
u = u_iter;
u_hist = [u_hist, u];
end🔧 STRUCTURE OVERVIEW:
3 Nodes, 2D: Node 1 (fixed), Node 2 (middle), Node 3 (right)
2 inclined truss bars: Bar 1 (Node 1–2), Bar 2 (Node 2–3)
6 DOFs (2 per node)
Load applied at Node 3 in the Y-direction
🧠 STEP-BY-STEP EXPLANATION:
✅ 1.
Define Material, Geometry, and Connectivity
A = 0.01; % Cross-sectional area (m²)
E = 200e9; % Elastic modulus (Pa)
Et = 2e9; % Tangent modulus after yield (Pa)
sigma_y = 250e6; % Yield stress (Pa)
coords0 = [0 0; 2 1; 4 0]; % Undeformed (initial) coordinates (3 nodes, X-Y)
conn = [1 2; 2 3]; % Element connectivityEach element connects two nodes.
The truss is inclined — so transformation is required.
✅ 2.
External Load Vector
F_ext = zeros(6,1);
F_ext(6) = -300e3; % Apply vertical load at Node 3 (DOF 6)Node 3 vertical DOF only.
✅ 3.
Initialization
u = zeros(6,1); % Nodal displacement vector (6 DOFs)
u_hist = []; % Store displacement historyInitially no displacements.
✅ 4.
Outer Load Step Loop (1 step shown for simplicity)
for step = 1:1
f_ext = F_ext;
u_iter = u;✅ 5.
Newton-Raphson Iteration Loop
for iter = 1:20
K_global = zeros(6);
f_int = zeros(6,1);Initialize residual and global stiffness for this iteration.
✅ 6.
Update Geometry with Current Displacement
coords = coords0 + reshape(u_iter, 2, [])';Updated Lagrangian: new geometry at each iteration.
✅ 7.
Loop Through Each Truss Element
for e = 1:2✅ 8.
Element Geometry and Strain
xi = coords(i,:); xj = coords(j,:);
x0i = coords0(i,:); x0j = coords0(j,:);
L0 = norm(x0j - x0i); % Original length
Le = norm(xj - xi); % Current length
eps = (Le - L0)/L0; % Engineering axial strain✅ 9.
Determine Effective Modulus
Ee = (abs(eps*E) < sigma_y) * E + (abs(eps*E) >= sigma_y) * Et;
N = A * Ee * eps; % Axial forceBilinear stress-strain model: switch from E to Et at yield.
✅ 10.
Transformation Matrix
lx = (xj(1) - xi(1)) / Le;
ly = (xj(2) - xi(2)) / Le;
T = [lx ly 0 0; 0 0 lx ly]; % Local → GlobalConverts 1D local stiffness and force to 2D global system.
✅ 11.
Local and Geometric Stiffness
ke = A * Ee / L0 * [1 -1; -1 1]; % Material stiffness
kg = N / Le * [1 -1; -1 1]; % Geometric stiffness✅ 12.
Transform to Global Coordinates
K_global_e = T' * (ke + kg) * T;✅ 13.
Assemble into Global Stiffness Matrix
idx = [2*i-1 2*i 2*j-1 2*j];
K_global(idx,idx) = K_global(idx,idx) + K_global_e;✅ 14.
Compute Internal Force from Strain
f_local = N * [-1; 1]; % Axial force vector in local
f_global = T' * f_local; % Convert to global
f_int(idx) = f_int(idx) + f_global;💡 No geometric stiffness used in force — only strain-based!
✅ 15.
Solve Residual and Update Displacement
r = f_ext - f_int;
if norm(r) < 1e-3, break; end
du = K_global \ r;
u_iter = u_iter + du;✅ 16.
Save Final Displacement
u = u_iter;
u_hist = [u_hist, u];✅ Summary
Feature | Implementation |
Geometry update | Yes (UL formulation) |
Geometric stiffness | Yes (added to K matrix) |
Material nonlinearity | Bilinear model (E, Et, σ_y) |
Internal force | Based on strain only (not from k_g) |
Transformation matrix | Converts local stiffness to global coordinates |
Solver | Newton-Raphson with convergence check |
