
Multi-Objective Optimization using PSO (MOPSO)--Spread Footing Design Example
- Adisorn O.
- Sep 27, 2025
- 3 min read

Updated: Sep 27, 2025
Problem setup
We want to design a square footing on soil that satisfies safety and economy.
Design variables:
B = footing width (m)
D = embedment depth (m)
Objectives (two conflicting goals):
Minimize cost
f_1 = Ccx B^2 xD
where Cc is unit cost of concrete per m³ (say 100 USD/m³).
Maximize bearing capacity safety (equivalent to minimizing failure risk)
For safety, we want large factor of safety (FS), but since MOPSO is minimization-oriented, we set:
f2 = 1/FS
with
FS = q_ult/q_applied
Bearing capacity (Terzaghi’s equation for square footing):
q_ult = 1.3 c x N_c + gamma xD x N_q + 0.4 gamma xB x N_gamma
where
c = soil cohesion (kPa),
gamma = unit weight (kN/m³),
N_c, N_q, N_gamma = Terzaghi's bearing capacity factors (from phi),
q_applied = P/B^2, load per unit area.
Steps of MOPSO
Initialize population of particles
Initialize external archive = non-dominated solutions
Repeat until max iterations:
For each particle:
Compute f1(x), f2(x), ...
Update velocity and position toward:
- Its own best (pBest)
- A leader chosen from archive (using diversity
selection)
Update archive with new non-dominated solutions
Maintain diversity (crowding or grid)
Return archive (Pareto front)
The main loop of MOPSO is shown as following
%% Main loop
for it=1:MaxIt
for i=1:nPop
% --- Select Leader ---
chosenLeader = SelectLeader(archive);
if isempty(chosenLeader)
% fallback: just use one of the current particles
chosenLeader = particle(randi(numel(particle)));
end
if ~isstruct(chosenLeader)
error('chosenLeader is not a struct, got: %s', class(chosenLeader));
end
if ~isfield(chosenLeader,'Position')
error('chosenLeader has no Position field');
end
% --- Velocity update ---
% particle(i).Velocity = w*particle(i).Velocity ...
% + c1*rand(1,nVar).*(particle(i).Best.Position - particle(i).Position) ...
% + c2*rand(1,nVar).*(chosenLeader.Position - particle(i).Position);
disp('Leader position:'), disp(chosenLeader.Position);
disp('Particle position:'), disp(particle(i).Position)
diffVec = chosenLeader.Position - particle(i).Position;
particle(i).Velocity = w*particle(i).Velocity ...
+ c1*rand(1,nVar).*(particle(i).Best.Position - particle(i).Position) ...
+ c2*rand(1,nVar).*diffVec;
% --- Position update ---
particle(i).Position = particle(i).Position + particle(i).Velocity;
% Apply bounds
particle(i).Position = max(particle(i).Position,VarMin);
particle(i).Position = min(particle(i).Position,VarMax);
% Evaluate
particle(i).Cost = fobj(particle(i).Position);
% Update personal best
if Dominates(particle(i).Cost,particle(i).Best.Cost)
particle(i).Best = particle(i);
elseif ~Dominates(particle(i).Best.Cost,particle(i).Cost) && rand<0.5
particle(i).Best = particle(i);
end
end
% --- Update archive ---
archive = UpdateArchive(archive,particle,archiveMaxSize);
% --- Plot Pareto front ---
endWhat are GBEST and PBEST in MOPSO framework?
The key difference in determining GBEST and PBEST in MOPSO from the single objective PSO is how to judge if the updated solution is better than the previous step. In PSO, we use objective function to measurthe improvement of the solution. However, in MOPSO, we consider non-dominant solution is the improvement. Therefore we can obtain GBEST from any solution in the archive by considering diversity of the solution i.e. crowding distance measurement (Deb, 2002) or probability based model (Mirjalili & Dong, 2019). The function to choose GBEST from archive using crowding distance technique is shown below.
function chosenLeader = SelectLeader(archive)
if isempty(archive)
% fallback: pick random from archive later
chosenLeader = [];
return;
end
% Build cost matrix
n = numel(archive);
nObj = numel(archive(1).Cost);
Costs = zeros(n, nObj);
for k = 1:n
Costs(k,:) = archive(k).Cost;
end
% Crowding distance
cd = CrowdingDistance(Costs);
if all(cd==0) || sum(cd)==0
idx = randi(n); % pick random
else
P = cd/sum(cd);
idx = RouletteWheelSelection(P);
if isempty(idx), idx = randi(n); end % safeguard
end
chosenLeader = archive(idx);
endThe RouleteWheelSelection() function is used to choose the GBEST considering the higher selection probability from the larger crowding distance i.e.
P = d/sum(d)
where d= crowding distance
c = cumsum(P)
function idx = RouletteWheelSelection(P)
r = rand; c = cumsum(P);
idx = find(r<=c,1,'first');
endFor each particle, PBEST is attained only when the new solution dominates the personal best record. According to the Pareto principle (Mirjalili & Dong, 2019), the function to consider whether x dominates y is shown below.
function b = Dominates(x,y)
b = all(x<=y) && any(x<y);
endOptimization Results

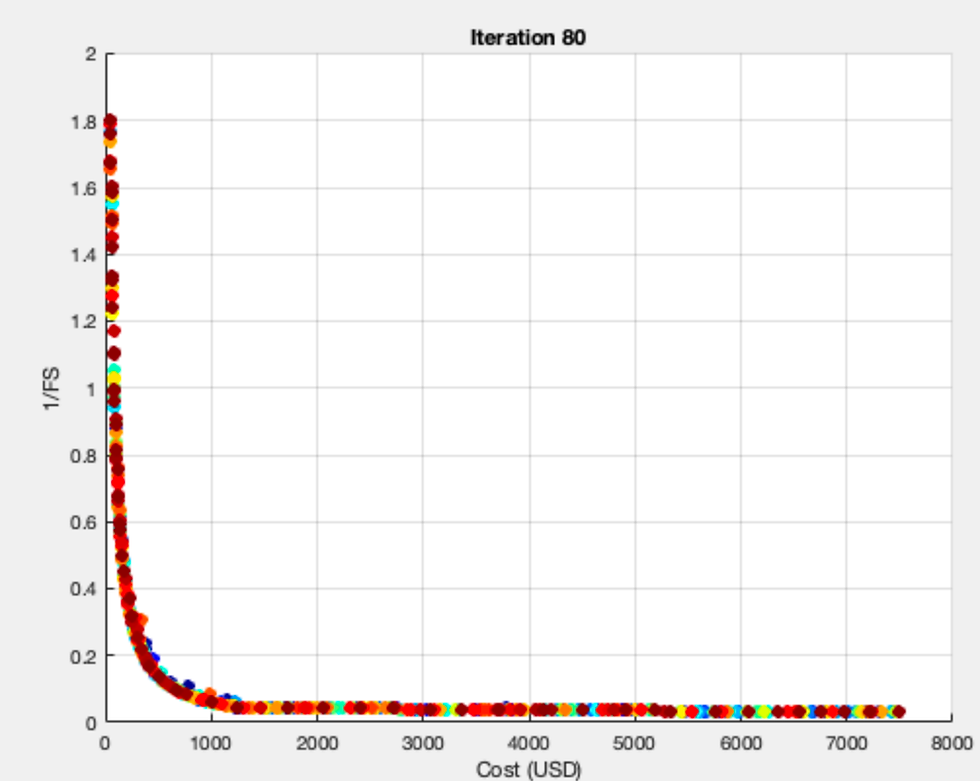
*The solutions evolve from blue (first iteration) to red (final iteration) towards
the Pareto front.
References:
Kalyanmoy Deb, Amrit Pratap, Sameer Agarwal, T. Meyarivan (2002).
A fast and elitist multiobjective genetic algorithm: NSGA-II.
IEEE Transactions on Evolutionary Computation, 6(2):182–197.
S Merjalili, JS Dong (2002), Multi-Objective Optimization using Artificial Intelligence Techniques, Springer